




使用CLion进行ROS开发
安装基本的ROS环境
ROS环境的安装请参考安装ROS。
安装CLion
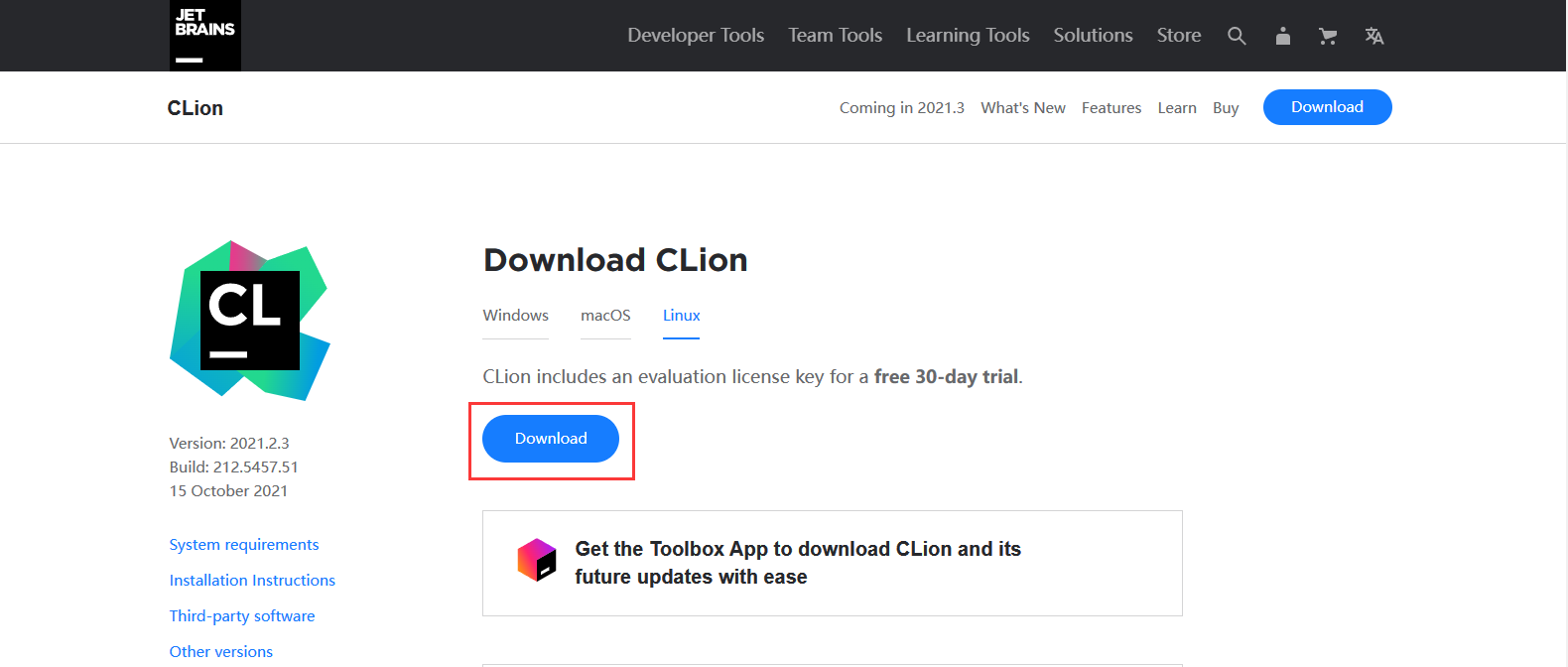
下载CLion
Linux的下载地址如下:CLion
解压CLion
将下载的CLion复制到/opt目录下(你可以解压到适合自己的文件夹,只要保证后续使用的路径一致即可),然后在这个目录下使用终端将其解压,命令如下所示(其中CLion-xxxx.xx.xx.tar.gx为下载的安装包名):
sudo tar -zxvf CLion-xxxx.xx.xx.tar.gx使用脚本安装CLion
运行解压后的文件夹中的clion.sh脚本,进行安装:
1.运行安装

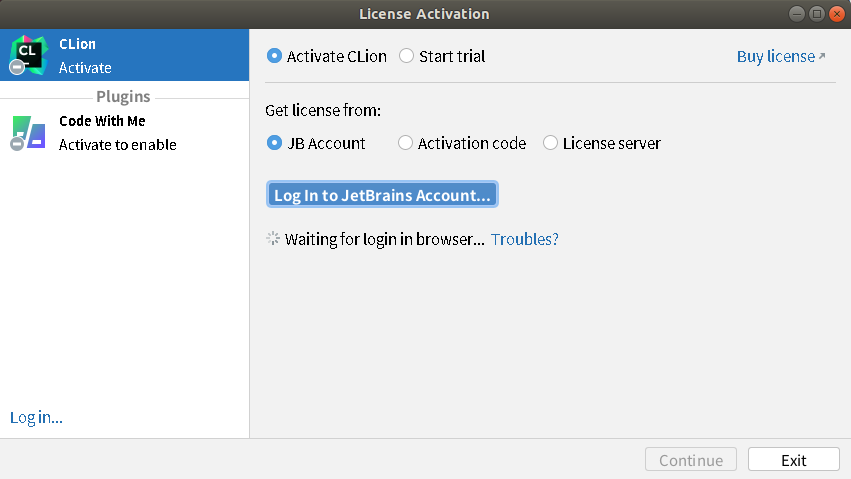
2.登录激活
可以选择教育邮箱激活教育版的使用授权,或者选择自己合适的激活方式。
创建快捷启动命令
创建一个名为clion的可执行文件,用于启动clion.sh脚本。
#创建一个文件
sudo vim /usr/bin/clion
#写入运行脚本的指命令,你也可使用自己的路径
sh /opt/clion-2021.2.3/bin/clion.sh
#更改clion的权限为可执行文件
sudo chmod +x /usr/bin/clion使用clion命名启动CLion
在终端中使用clion启动,如下所示:
创建ROS功能包进行测试
创建并初始化ros的工作空间
使用相应的工具或者命令创建并初始化工作空间,比如我这里创建了一个路径为~/code/roswp/,并使用catkin的相关命令初始化并编译。
创建功能包
这里我们创建一个简单的打印三次helloworld的功能包,节点命名为sayHelloWorld,cmakelist文件请自行修改,代码如下所示:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char **argv)
{
//初始化节点
ros::init(argc, argv, "talker");
//创建节点句柄
ros::NodeHandle n;
//循环3次输出hello world
for(int i=0;i<3;i++){
ROS_INFO("Hello World!\n");
}
return 0;
}使用CLion打开功能包并进行相应的配置
source工作空间的setup.bash
在工作空间文件夹下执行source devel/setup.bash命令,然后启动CLion,并打开工作空间的src文件夹。
设置catkin的build路径
在File | Settings | Build, Execution, Deployment | CMake 选项中进行配置:
1.Bulid directory选项
修改为:WORKSPACE_DIRECTORY/build,也就是工作空间下的build文件夹。
2.CMake options选项
修改为:-DCATKIN_DEVEL_PREFIX:PATH=WORKSPACE_DIRECTORY/devel,也就是工作空间下的devel文件夹。
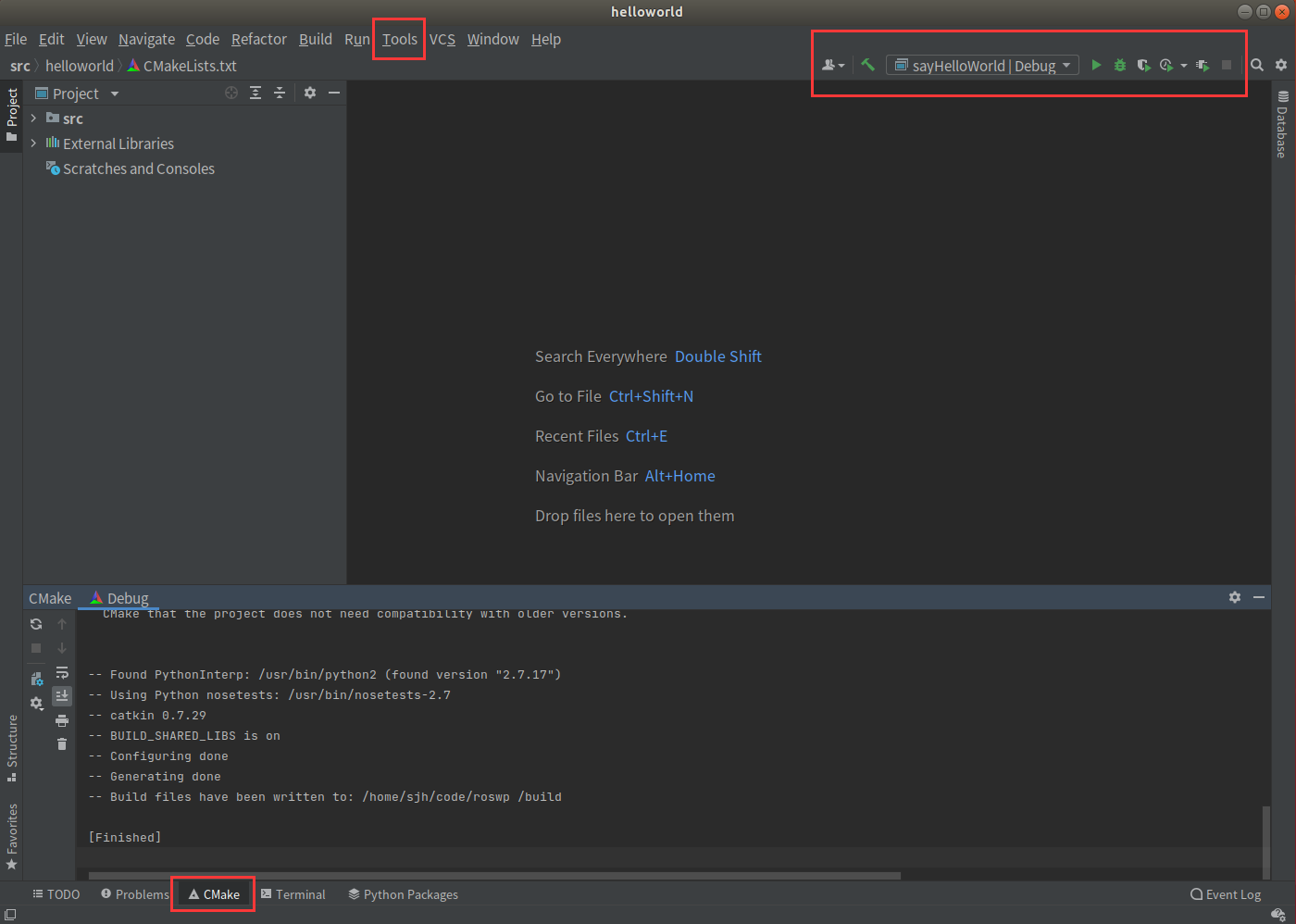
加载Cmake项目
使用Tools | CMake | Reload CMake Project加载CMake项目,如果CMake正常加载完成,可以看到右上角的运行窗口可以检测到相应的可执行文件。
使用CLion运行节点
使用终端启动roscore,然后使用右上角的运行按钮运行节点,结果如下所示:
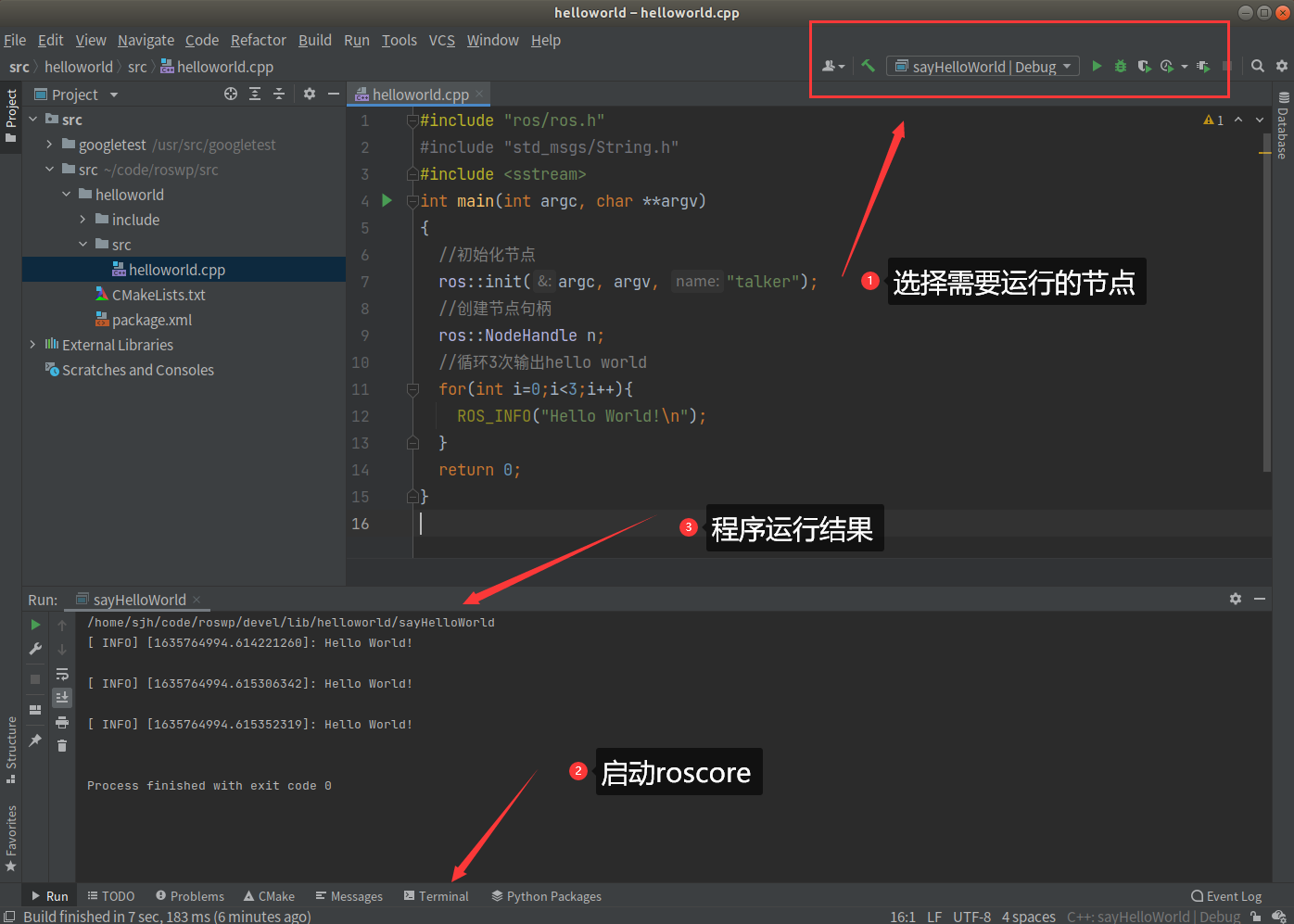
其他运行和Debug方法与一般情况下使用CLion类似。


Comments | NOTHING